这是在数模课上做的随堂笔记,插值和拟合更详细的自学笔记请看数模自学笔记——插值和拟合 。
插值 变量之中存在的函数关系,有时不能确定,而是通过获得的数据来找出两个变量间可能存在的连续。
这东西和拟合有点像。
未知 f ( x ) f(x) f ( x ) f ( x ) f(x) f ( x ) ( x i , y i ) (x_i, y_i) ( x i , y i ) φ ( x ) ≈ f ( x ) \varphi(x) \approx f(x) φ ( x ) ≈ f ( x ) φ ( x ) \varphi(x) φ ( x )
这里使用的是多段分段函数进行近似。
常用的方法有:线性插值 linear、三次样条插值 spline、三次插值 cubic。推荐使用三次样条插值。
MATLAB 函数:y_new = interp1(x,y,x_new,option)
二维插值。这里不能使用 interp2 而需要使用 griddata,Google 了一下:
二者均是常用的二维差值方法,两者的区别是,interp2 的插值数据必须是矩形域,即已知数据点 (x,y) 组成规则的矩阵,或称之为栅格,可使用 meshgrid 生成。而 griddata 函数的已知数据点 (x,y) 不要求规则排列,特别是对试验中随机没有规律采取的数据进行插值具有很好的效果。
griddata(X,Y,XI,YI,'v4') v4是一种插值算法,没有具体的名字,原文称为“MATLAB 4 griddatamethod”,是一种很圆滑的插值算法,效果不错。X 和 Y 提供的已知数据点,XI 和 YI是需要插值的数据点,一般使用 meshgrid 生成,当然也可以其他数据,但是那样绘图的时候就比较麻烦,不能使用 mesh 等,只能使用 trimesh。
拟合 数值微分 微分其实用的不多。常用于解微分方程 。
前面两个差商比较垃圾,但是处理端点好用:
一阶前向差商(左端点) f ′ ( a ) = f ( a + h ) − f ( a ) h + O ( h ) f'(a)=\frac{f(a+h)-f(a)}{h}+O(h) f ′ ( a ) = h f ( a + h ) − f ( a ) + O ( h )
一阶后向差商(右端点) f ′ ( a ) = f ( a ) − f ( a − h ) h + O ( h ) f'(a)=\frac{f(a)-f(a-h)}{h}+O(h) f ′ ( a ) = h f ( a ) − f ( a − h ) + O ( h )
一阶中心差商(中间部分) f ′ ( a ) = f ( a + h ) − f ( a − h ) 2 h + O ( h 2 ) f'(a)=\frac{f(a+h)-f(a-h)}{2h}+O(h^2) f ′ ( a ) = 2 h f ( a + h ) − f ( a − h ) + O ( h 2 )
二阶中心差商 f ′ ′ ( a ) = f ( a + h ) + f ( a − h ) − 2 f ( a ) h 2 + O ( h 2 ) f''(a) =\frac{f(a+h)+f(a-h)-2f(a)}{h^2}+O(h^2) f ′ ′ ( a ) = h 2 f ( a + h ) + f ( a − h ) − 2 f ( a ) + O ( h 2 )
证明都是通过泰勒展式,略。
实际使用时,令 h h h h = 1 0 − 5 h=10^{-5} h = 1 0 − 5 f f f a a a
数值方法求梯度 参考链接:https://www.bilibili.com/video/av59319786
梯度的定义:
$$\nabla f(\boldsymbol{x}) = \left[\begin{matrix}
\frac{\partial f}{\partial x_1} \
\frac{\partial f}{\partial x_2} \
\vdots \
\frac{\partial f}{\partial x_n}
\end{matrix}\right]$$
数值方法求梯度,其实就是上面的微分方法用来求 n 遍偏导。
∂ f ∂ x i = f ( x ; x i + Δ x i ) − f ( x ; x i − Δ x i ) 2 x i + O ( ( Δ x i ) 2 ) \frac{\partial f}{\partial x_i} = \frac{ f(\boldsymbol{x};x_i+\Delta x_i) - f(\boldsymbol{x};x_i-\Delta x_i)}{2x_i} + O \left((\Delta x_i)^2 \right) ∂ x i ∂ f = 2 x i f ( x ; x i + Δ x i ) − f ( x ; x i − Δ x i ) + O ( ( Δ x i ) 2 ) 数值方法求黑塞矩阵 黑塞矩阵:
∇ 2 f ( x ) = [ ∂ 2 f ∂ x 1 2 ∂ 2 f ∂ x 1 ∂ x 2 ⋯ ∂ 2 f ∂ x 1 ∂ x n ∂ 2 f ∂ x 2 ∂ x 1 ∂ 2 f ∂ x 2 2 ⋯ ∂ 2 f ∂ x 2 ∂ x n ⋮ ⋮ ⋱ ⋮ ∂ 2 f ∂ x n ∂ x 1 ∂ 2 f ∂ x n ∂ x 2 ⋯ ∂ 2 f ∂ x n 2 ] \nabla^2f(\boldsymbol{x})=\left[\begin{array}{cccc}
{\frac{\partial^2 f}{\partial x_1^2}} & {\frac{\partial^2 f}{\partial x_1 \partial x_2}} & {\cdots} & {\frac{\partial^2 f}{\partial x_1 \partial x_n}} \\
{\frac{\partial^2 f}{\partial x_2 \partial x_1}} & {\frac{\partial^2 f}{\partial x_2^2}} & {\cdots} & {\frac{\partial^2 f}{\partial x_2 \partial x_n}} \\
{\vdots} & {\vdots} & {\ddots} & {\vdots} \\
{\frac{\partial^2 f}{\partial x_n \partial x_1}} & {\frac{\partial^2 f}{\partial x_n \partial x_2}} & {\cdots} & {\frac{\partial^2 f}{\partial x_n^2}}
\end{array}\right] ∇ 2 f ( x ) = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ ∂ x 1 2 ∂ 2 f ∂ x 2 ∂ x 1 ∂ 2 f ⋮ ∂ x n ∂ x 1 ∂ 2 f ∂ x 1 ∂ x 2 ∂ 2 f ∂ x 2 2 ∂ 2 f ⋮ ∂ x n ∂ x 2 ∂ 2 f ⋯ ⋯ ⋱ ⋯ ∂ x 1 ∂ x n ∂ 2 f ∂ x 2 ∂ x n ∂ 2 f ⋮ ∂ x n 2 ∂ 2 f ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ 其实和上面本质是一样的,只是二阶导要求两次。推导过程就略了(可以看上面参考链接的视频),最后的每一项的结果如下:
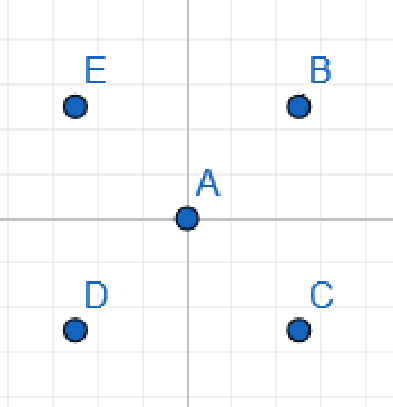
∂ 2 f ∂ x i ∂ x j = 1 4 Δ x i Δ x j [ f ( x ; x i + Δ x i , x j + Δ x j ) + f ( x ; x i − Δ x i , x j − Δ x j ) − f ( x ; x i − Δ x i , x j + Δ x j ) − f ( x ; x i + Δ x i , x j − Δ x j ) ] + O ( ( Δ x i ) 2 ) \begin{aligned}
\frac{\partial^2 f}{\partial x_i \partial x_j} = &\frac{1}{4\Delta x_i\Delta x_j} \bigg[ \\
&f(\boldsymbol{x};x_i+\Delta x_i,x_j+\Delta x_j) + f(\boldsymbol{x};x_i-\Delta x_i,x_j-\Delta x_j)\\
&-f(\boldsymbol{x};x_i-\Delta x_i,x_j+\Delta x_j) - f(\boldsymbol{x};x_i+\Delta x_i,x_j-\Delta x_j)\bigg] \\
&+ O((\Delta x_i)^2)
\end{aligned} ∂ x i ∂ x j ∂ 2 f = 4 Δ x i Δ x j 1 [ f ( x ; x i + Δ x i , x j + Δ x j ) + f ( x ; x i − Δ x i , x j − Δ x j ) − f ( x ; x i − Δ x i , x j + Δ x j ) − f ( x ; x i + Δ x i , x j − Δ x j ) ] + O ( ( Δ x i ) 2 ) 看起来麻烦,其实就是如下图,需要找得到 A 点的二阶偏导时,将 A 的 x i , x j x_i, x_j x i , x j Δ x i , Δ x j \Delta x_i, \Delta x_j Δ x i , Δ x j 4 Δ x i Δ x j 4\Delta x_i\Delta x_j 4 Δ x i Δ x j
注意这个方法不能用在对角线上。求对角线上的二阶导仍需要用上面数值微分提到的求二阶导方法。
∂ 2 f ∂ x i 2 = f ( x ; x i + Δ x i ) + f ( x ; x i − Δ x i ) − 2 f ( x ) ( Δ x i ) 2 + O ( ( Δ x i ) 2 ) \frac{\partial^2 f}{\partial x_i^2} =\frac{ f(\boldsymbol{x};x_i+\Delta x_i) + f(\boldsymbol{x};x_i-\Delta x_i) - 2f(\boldsymbol{x}) } {(\Delta x_i)^2}+O((\Delta x_i)^2) ∂ x i 2 ∂ 2 f = ( Δ x i ) 2 f ( x ; x i + Δ x i ) + f ( x ; x i − Δ x i ) − 2 f ( x ) + O ( ( Δ x i ) 2 ) 数值积分 按积分定义有:
∫ a b f ( x ) d x = lim h → 0 ∑ i = 1 n f ( x j ) h \int_a^bf(x)dx=\lim_{h\to0}\sum_{i=1}^nf(x_j)h ∫ a b f ( x ) d x = h → 0 lim i = 1 ∑ n f ( x j ) h 当 h h h
数值积分分为左矩形法(积分的高度按左端点的函数值计算)、右矩形法。
效率不高(即使是一重积分中,h h h
构造思路:想构造 A k A_k A k
∫ a b f ( x ) d x = ∑ k = 0 n A k f ( x k ) + R [ f ] \int_a^b f(x)dx=\sum_{k=0}^nA_kf(x_k)+R[f] ∫ a b f ( x ) d x = k = 0 ∑ n A k f ( x k ) + R [ f ] R [ f ] = ∫ a b f ( x ) d x − ∑ k = 0 n A k f ( x k ) R[f] = \int_a^b f(x)dx - \sum_{k=0}^nA_kf(x_k) R [ f ] = ∫ a b f ( x ) d x − ∑ k = 0 n A k f ( x k )
求积公式的代数精度 对于每个求积公式,我们用对多项式进行求积,来定义 m m m
对于不高于 m m m P ( x ) P(x) P ( x ) $R[f] = \int_a^b P(x)dx - \sum_{k=0}^nA_kP(x_k) \equiv 0 m + 1 m+1 m + 1 $\int_a^b f(x)dx \approx \sum_{k=0}^nA_kf(x_k) m m m
插值型求和公式 Lagrange 插值求积公式 这是基于 Lagrange 插值法的一个方法。
从思想上来说,Lagrange 插值法是通过函数 f ( x ) f(x) f ( x ) n + 1 n+1 n + 1 ( x j , y j ) (x_j, y_j) ( x j , y j ) p ( x ) p(x) p ( x ) f ( x ) f(x) f ( x ) n n n n + 1 n+1 n + 1 f ( x ) f(x) f ( x ) n + 1 n+1 n + 1 p ( x ) p(x) p ( x ) p ( x ) p(x) p ( x ) f ( x ) f(x) f ( x )
在 Lagrange 插值中,已知 n + 1 n+1 n + 1 ( x j , y j ) (x_j, y_j) ( x j , y j ) Lagrange 插值多项式 为:
p ( x ) ≈ ∑ j = 0 k y j l j ( x ) p(x) \approx \sum_{j=0}^k y_j l_j(x) p ( x ) ≈ j = 0 ∑ k y j l j ( x ) 其中
l j ( x ) = ∏ i = 0 , i ≠ j n x − x i x j − x i = ( x − x 0 ) ( x j − x 0 ) ⋯ ( x − x j − 1 ) ( x j − x j − 1 ) ( x − x j + 1 ) ( x j − x j + 1 ) ⋯ ( x − x k ) ( x j − x k ) l_j(x) = \prod_{i=0, i \neq j}^n\frac{x-x_i}{x_j-x_i}=\frac{(x-x_0)}{(x_j-x_0)} \cdots \frac{(x-x_{j-1})}{(x_j-x_{j-1})} \frac{(x-x_{j+1})}{(x_j-x_{j+1})} \cdots \frac{(x-x_{k})}{(x_j-x_{k})} l j ( x ) = i = 0 , i = j ∏ n x j − x i x − x i = ( x j − x 0 ) ( x − x 0 ) ⋯ ( x j − x j − 1 ) ( x − x j − 1 ) ( x j − x j + 1 ) ( x − x j + 1 ) ⋯ ( x j − x k ) ( x − x k ) 公式的正确性略,请读者自行查阅资料。注意,这个 l j ( x ) l_j(x) l j ( x )
下面我们利用 Lagrange 插值公式进行求积的推导:
f ( x ) ≈ p ( x ) ∫ a b f ( x ) ≈ ∫ a b ∑ j = 0 k l j ( x ) ⋅ y j ≈ ∑ j = 0 k [ ∫ a b l j ( x ) ] f ( x j ) \begin{aligned}
f(x) &\approx p(x) \\
\int_a^b f(x) &\approx \int_a^b \sum_{j=0}^k l_j(x) \cdot y_j \\
&\approx \sum_{j=0}^k \left[ \int_a^b l_j(x) \right] f(x_j)
\end{aligned} f ( x ) ∫ a b f ( x ) ≈ p ( x ) ≈ ∫ a b j = 0 ∑ k l j ( x ) ⋅ y j ≈ j = 0 ∑ k [ ∫ a b l j ( x ) ] f ( x j ) 令 A j = ∫ a b l j ( x ) A_j = \int_a^b l_j(x) A j = ∫ a b l j ( x ) 前面 所提到的公式:
∫ a b f ( x ) = ∑ j = 0 k A j f ( x j ) + R [ f ] \int_a^b f(x) = \sum_{j=0}^k A_j f(x_j) + R[f] ∫ a b f ( x ) = j = 0 ∑ k A j f ( x j ) + R [ f ] 可以证明此法的
R [ f ] = ∑ a b f ( n + 1 ) ( ξ ) ( n + 1 ) ! ω ( x ) d x R[f] = \sum_a^b \frac{f^{(n+1)}(\xi)}{(n+1)!} \omega(x)dx R [ f ] = a ∑ b ( n + 1 ) ! f ( n + 1 ) ( ξ ) ω ( x ) d x 其中 ω ( x ) = ∏ i = 0 n ( x − x i ) \omega(x)=\prod_{i=0}^n (x-x_i) ω ( x ) = ∏ i = 0 n ( x − x i )
进一步推进,对于 n + 1 n+1 n + 1 n n n n n n
应用 1 梯形公式 我们可以把整段区间的积分,分割为数个小区间的积分再求和。在求小区间的积分的时候,我们对小区间的两个端点进行拉格朗日插值积分。
对于两点 ( a , f ( a ) ) , ( b , f ( b ) ) (a,f(a)), (b,f(b)) ( a , f ( a ) ) , ( b , f ( b ) )
l 0 ( x ) = x 1 − x x 1 − x 0 l 1 ( x ) = x − x 0 x 1 − x 0 l_0(x)=\frac{x_1-x}{x_1-x_0}\quad l_1(x)=\frac{x-x_0}{x_1-x_0} l 0 ( x ) = x 1 − x 0 x 1 − x l 1 ( x ) = x 1 − x 0 x − x 0 A 0 = ∫ a b b − x b − a d x = 1 2 ( b − a ) A 1 = ∫ a b x − a b − a d x = 1 2 ( b − a ) A_0=\int_a^b \frac{b-x}{b-a}dx=\frac{1}{2}(b-a) \quad A_1=\int_a^b \frac{x-a}{b-a}dx=\frac{1}{2}(b-a) A 0 = ∫ a b b − a b − x d x = 2 1 ( b − a ) A 1 = ∫ a b b − a x − a d x = 2 1 ( b − a ) ∫ a b f ( x ) d x ≈ b − a 2 [ f ( a ) + f ( b ) ] \int_a^b f(x)dx \approx \frac{b-a}{2}[f(a) + f(b)] ∫ a b f ( x ) d x ≈ 2 b − a [ f ( a ) + f ( b ) ] 误差
R = ∫ a b f ′ ′ ( ξ ) 2 ( x − a ) ( x − b ) d x = f ′ ′ ( η ) 2 ∫ a b ( x − a ) ( x − b ) d x = − ( b − a ) 3 12 f ′ ′ ( η ) \begin{aligned}
R &=\int_a^b \frac{f''(\xi)}{2}(x-a)(x-b)dx \\
&= \frac{f''(\eta)}{2}\int_a^b (x-a)(x-b)dx \\
&=-\frac{(b-a)^3}{12}f''(\eta)
\end{aligned} R = ∫ a b 2 f ′ ′ ( ξ ) ( x − a ) ( x − b ) d x = 2 f ′ ′ ( η ) ∫ a b ( x − a ) ( x − b ) d x = − 1 2 ( b − a ) 3 f ′ ′ ( η ) 要使误差小:一是区间取小,二是二阶导数小(曲线更趋近于直线,几何上看也比较明显)
梯形公式具有 1 阶代数精度。
MATLAB 梯形法数值积分 trapz
另外梯形公式还能够推出另外一个公式:
来自数学建模实验的笔记:
这是积分中值定理:$\exists \xi, \quad \int_a^bf(x) = (b-a)f(\xi)
在数值积分时,可以在 [ a , b ] [a, b] [ a , b ] f ( x ) f(x) f ( x ) f ( ξ ) f(\xi) f ( ξ )
貌似是数值积分的套路操作,但是微积分 I 没有讲。
2020.2.22 更新:确实,这是梯形公式(opens new window) ,可见维基百科
应用 2 Simpson 公式(三点积分公式) 依旧是把整段区间的积分,分割为的积分再求和。不过,在求小区间的积分的时候,我们改用二次函数近似,在一个区间上取三个点(两个端点+中点)。
计算过程仍然是类似于梯形公式,算 l j ( x ) l_j(x) l j ( x ) A j A_j A j y j y_j y j
∫ a b f ( x ) d x ≈ b − a 6 [ f ( a ) + 4 f ( a + b 2 ) + f ( b ) ] \int_a^b f(x)dx \approx \frac{b-a}{6} \left[ f(a)+4f(\frac{a+b}{2})+f(b) \right] ∫ a b f ( x ) d x ≈ 6 b − a [ f ( a ) + 4 f ( 2 a + b ) + f ( b ) ] 近似效果会好些。
Simpson 公式竟然具有 3 阶代数精度。
当然,还可以用高次函数来跑 Lagrange 插值积分,但是高次函数有震荡性,一般就使用线性或二次即可。
Newton-Cotes 公式 使用 Lagrange 插值求积时,如果取的点为等距的(即 x j = a + j h x_j = a + jh x j = a + j h
Newton-Cotes 公式代数精度至少为 n n n n n n n n n ( n + 1 ) (n+1) ( n + 1 )
复合梯形求积公式 将积分区间先拆为 n n n
然后分的更细,使区间变为上一次的 1 2 \frac{1}{2} 2 1 是迭代法!
迭代的时候要重复使用之前的结果,只需要补上新增的点的 f ( x j 1 ) f(x_{j_1}) f ( x j 1 )
这样迭代的好处是,我不知道这个算法算到哪种程度才能算特别精确,所以就一直算。但是这样算的本质和直接算其实都是一样的。
由于我一直在利用之前迭代的结果,所以直接算的算法时间复杂度其实和迭代的时间复杂度是一样的。
复合梯形法可以套用前面的所有插值法。
蒙特卡罗方法求积分 很显然的方法就是在每一维上取一些点,计算 1 0 n 10^n 1 0 n
于是使用随机投点法,用矩形框起来,然后随机投点,计算概率,即可估算积分大小。
优点:算法复杂度和函数无关,和维数无关
高斯型数值积分公式 震惊!选取好的求积结点,就可以用两个点能得到线性插值的代数精度为 3?
以下是插值型求积公式(我们讨论在 [ − 1 , 1 ] [-1,1] [ − 1 , 1 ]
∫ − 1 1 f ( x ) d x ≈ A 0 f ( x 0 ) + A 1 f ( x 1 ) \int_{-1}^1f(x)dx \approx A_0f(x_0) + A_1f(x_1) ∫ − 1 1 f ( x ) d x ≈ A 0 f ( x 0 ) + A 1 f ( x 1 ) 为保证代数精度为 3,令 f ( x ) = 1 , x , x 2 , x 3 f(x) = 1, x, x^2, x^3 f ( x ) = 1 , x , x 2 , x 3
{ A 0 + A 1 = 2 ( 1 ) A 0 x 0 + A 1 x 1 = 0 ( 2 ) A 0 x 0 2 + A 1 x 1 2 = 2 / 3 ( 3 ) A 0 x 0 3 + A 1 x 1 3 = 0 ( 4 ) \left\{ \begin{matrix}
A_0+A_1 &=2 & (1) \\
A_0x_0+A_1x_1 &=0 & (2) \\
A_0x_0^2+A_1x_1^2 &=2/3 & (3) \\
A_0x_0^3+A_1x_1^3 &=0 & (4)
\end{matrix}\right. ⎩ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎧ A 0 + A 1 A 0 x 0 + A 1 x 1 A 0 x 0 2 + A 1 x 1 2 A 0 x 0 3 + A 1 x 1 3 = 2 = 0 = 2 / 3 = 0 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 虽然是非线性不好解,但是可以解得:
A 0 = A 1 = 1 , x 0 = − 1 3 , x 1 = 1 3 A_0=A_1=1,\quad x_0=-\frac{1}{\sqrt{3}},\quad x_1=\frac{1}{\sqrt{3}} A 0 = A 1 = 1 , x 0 = − 3 1 , x 1 = 3 1 也就是说,如果我们按照 x 0 , x 1 x_0, x_1 x 0 , x 1
定义 如果求积结点 x 0 , x 1 , . . . , x n x_0, x_1, ..., x_n x 0 , x 1 , . . . , x n $\int_{-1}^1f(x)dx \approx \sum_{k=0}^nA_kf(x_k) 2 n + 1 2n+1 2 n + 1
定理 如果多项式 w n + 1 ( x ) = ( x − x 0 ) ( x − x 1 ) ⋯ ( x − x n ) w_{n+1}(x)=(x-x_0)(x-x_1)\cdots(x-x_n) w n + 1 ( x ) = ( x − x 0 ) ( x − x 1 ) ⋯ ( x − x n ) n n n P ( x ) P(x) P ( x ) $\int_{-1}^1 w_{n+1}(x)P(x)dx = 0 w n + 1 ( x ) w_{n+1}(x) w n + 1 ( x ) x i x_i x i
对于别的区间,可以进行伸缩变换:
quad
Legendre多项式递推式 真心看不懂辣